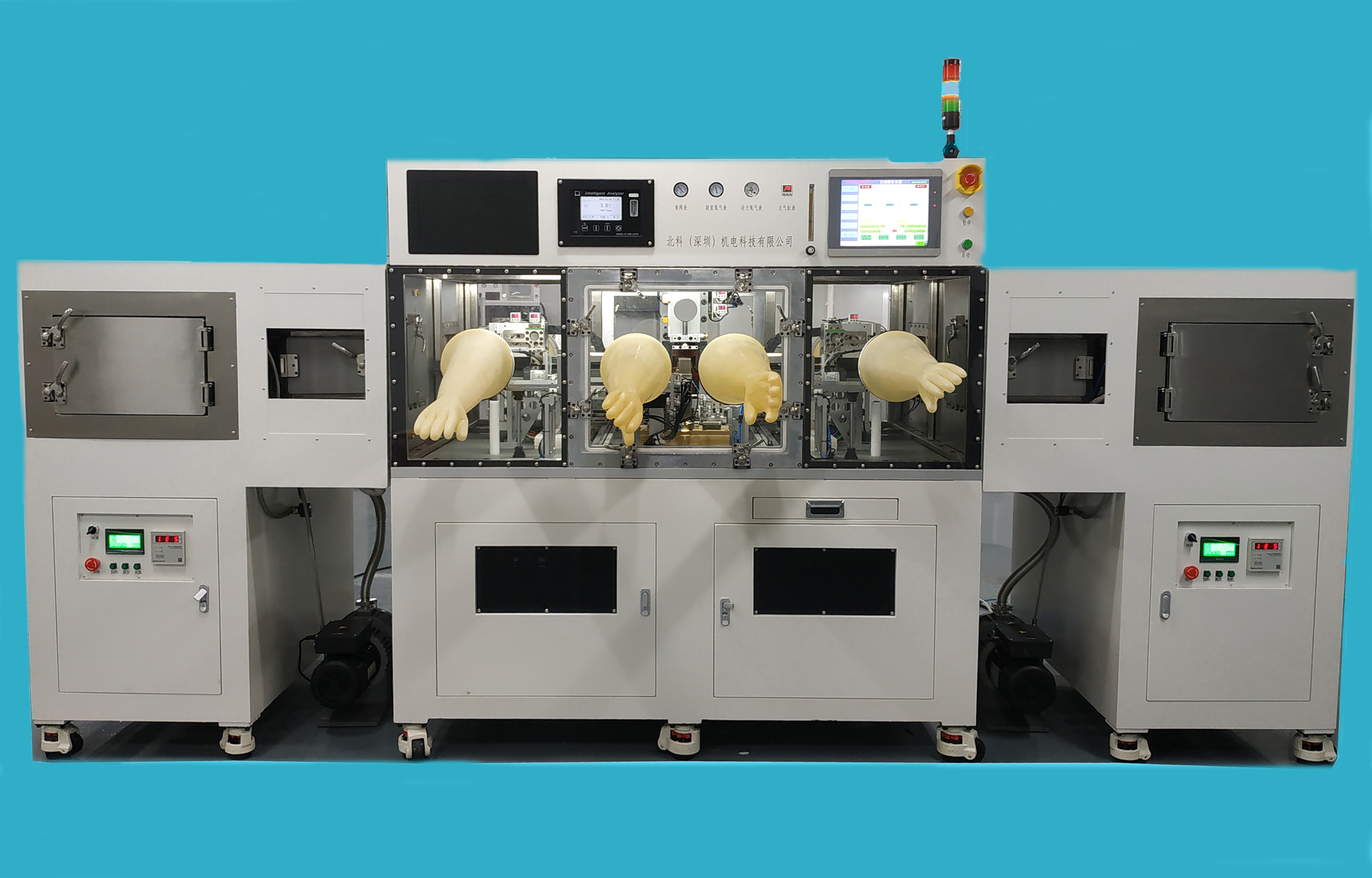
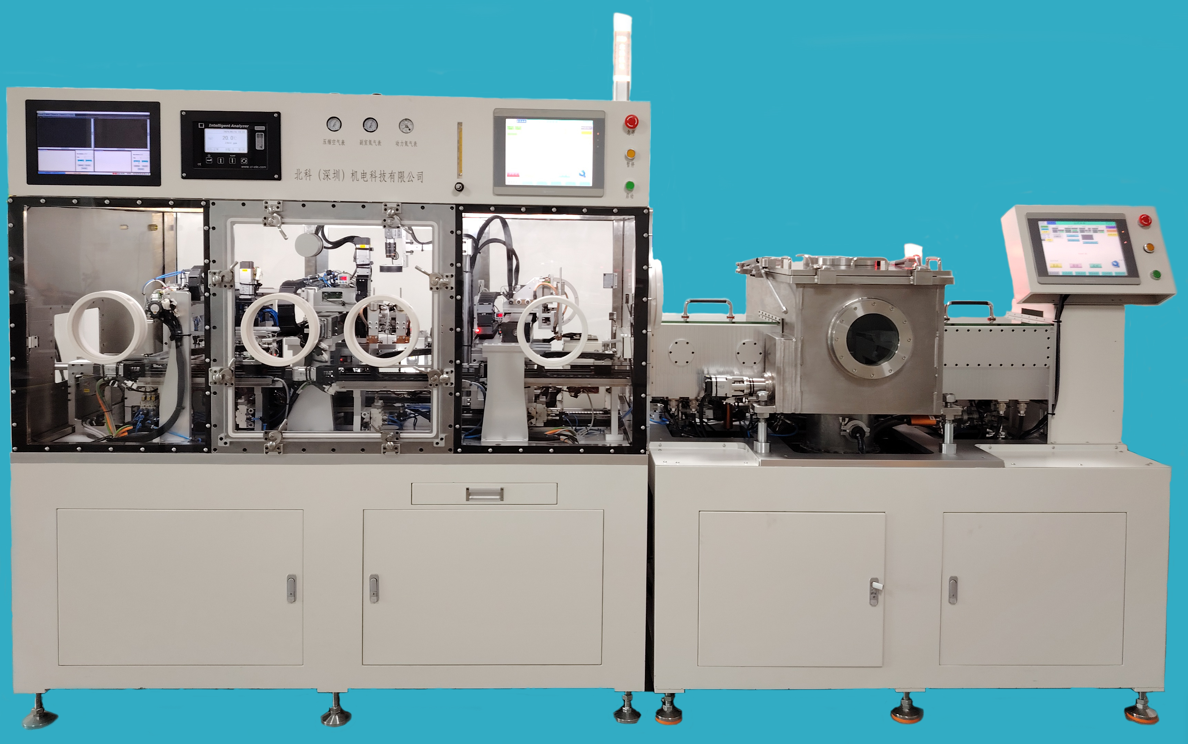
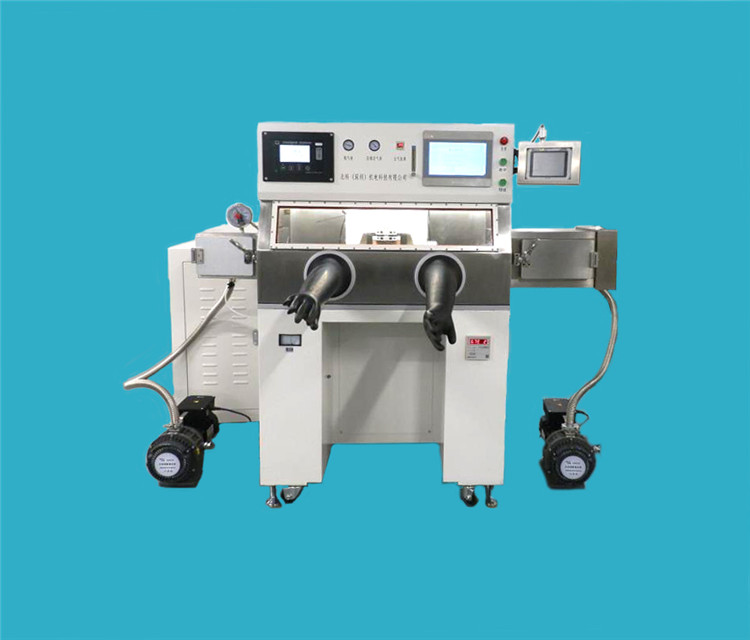
光電器件TO46、TO56、TO39、TO38等高精度封焊設備
訂購咨詢熱線:0755-28997636
15899867682 13321105262
全自動視覺封焊機是一種廣泛應用于焊接領(lǐng)域的自動化設備,它的工作原理主要涉及以下幾個步驟:
視覺定位:首先,采用相機或其他視覺系統(tǒng),對需要焊接的工件進行圖像采集。通過圖像處理算法,識別并定位焊接接頭或目標區(qū)域的位置和形狀。
路徑規(guī)劃:根據(jù)視覺定位得到的焊接目標區(qū)域的位置信息,結(jié)合預先設定的焊接路徑和參數(shù),計算出焊頭的運動路徑和速度。路徑規(guī)劃旨在保證焊接過程中的精度和效率。
動作控制:根據(jù)路徑規(guī)劃的結(jié)果,在機器人或焊接設備上通過伺服驅(qū)動器控制焊頭的運動。焊頭的運動可以包括直線運動、旋轉(zhuǎn)運動等,以達到焊接的要求。
溫度控制:在焊接過程中,控制焊頭的溫度是關(guān)鍵。通過控制焊接電流、電壓和焊接時間等參數(shù),確保焊接區(qū)域的溫度達到適宜的焊接溫度,以實現(xiàn)焊接效果。
焊接過程監(jiān)控:全自動視覺封焊機通常配備有傳感器和監(jiān)控系統(tǒng),用于實時監(jiān)測焊接過程中的參數(shù)和狀態(tài)。通過監(jiān)測焊接質(zhì)量、溫度、電流等指標,及時調(diào)整焊接參數(shù)和控制焊接質(zhì)量。

掃一掃加好友

微信公眾號
地址:深圳市龍崗區(qū)園山街道大康社區(qū)東海科技工業(yè)園10號三樓
聯(lián)系人:李華春
郵箱:15899867682@139.com